


Пневматические захваты, как ключевая технология в автоматизации, выводят технологии захвата роботами на новый уровень развития.
Используя принцип пневматического привода, пневматические захваты управляют открытием и закрытием губок путем регулирования давления воздуха. В сравнении с традиционными электрическими или гидравлическими захватами, они обладают такими преимуществами, как простая конструкция и высокая скорость отклика. Более того, их гибкий способ захвата позволяет с легкостью работать с объектами различных форм, размеров и материалов, значительно повышая адаптивность и универсальность роботов.
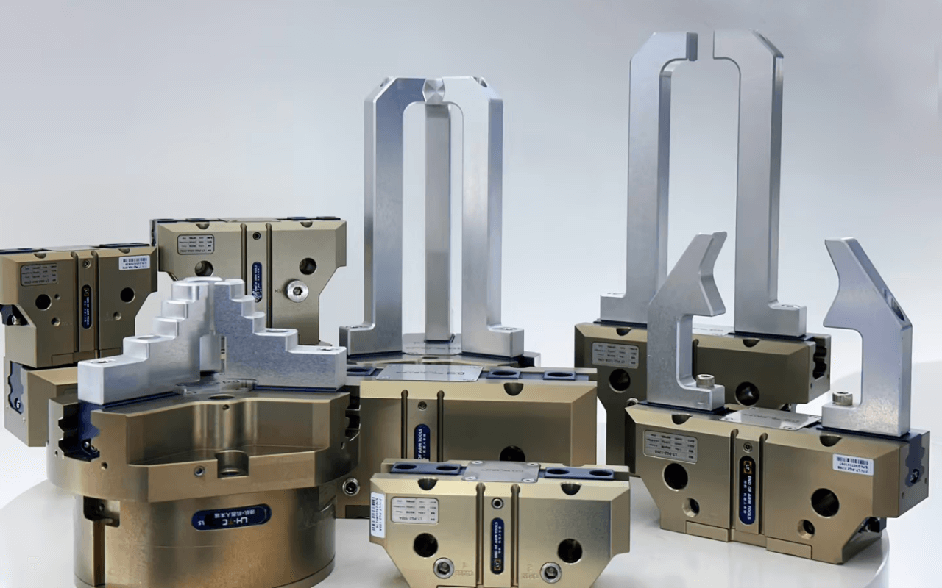
В сфере промышленной автоматизации пневматические захваты имеют широкие перспективы применения. В таких отраслях, как автомобилестроение, производство электроники и пищевая промышленность, они широко используются в процессах перемещения материалов, сборки и упаковки. Их высокая эффективность и точность позиционирования не только значительно повышают производительность, но и помогают снизить затраты и риски, связанные с ручным трудом.
Кроме того, гибкий захват пневматических устройств способствует развитию коллаборативных роботов. Так как такие роботы работают в одном пространстве с человеком, их системы захвата должны обладать высокой степенью безопасности и надежности. Благодаря своей мягкой и деликатной работе, пневматические захваты позволяют точно и безопасно захватывать объекты, не повреждая их, что гарантирует безопасность коллаборативных роботов.
Появление технологий пневматических захватов ознаменовало новый этап развития технологий роботизированного захвата. В будущем, с дальнейшими инновациями и расширением сфер применения, пневматические захваты станут неотъемлемой частью промышленной автоматизации.


Стенд LH-TC: 14H-FO15Место проведения: Международный выставочный центр Зап…

В современном быстро развивающемся промышленном мире автоматизация стала н…

Весна в расцветеАромат весеннего чая · Сила в единстве Весенние горы, слов…


26 марта в Международном выставочном центре Шэньчжэня торжествен…
+86 17335767268
Онлайн чат Русский
Русский



